贝博体育艾弗森代言:【48812】直流无刷电动机作业原理与操控方法
的结构简略、运转牢靠、保护便利等一系列长处,又具有的运转效率高、无励磁损耗以及调速性能好等许多长处,故在当今国民经济各范畴使用日益广泛。
一个多世纪以来,电动机作为机电能量转化设备,其使用场景规模已广泛国民经济的一切的范畴以及人们的日常主页中。其主要类型有同步电动机、异步电动机和直流电动机三种。因为传统的直流电动机均选用电刷以机械方法来进行换向,因此存在相对的机械冲突,由此带来了噪声、火化、无线电搅扰以及寿命短等缺陷,再加上制作本钱高及修理困难等缺陷,然后大大约束了它的使用场景规模,致使现在工农业生产上大多数均选用三相异步电动机。
针对上述传统直流电动机的弊端,早在上世纪30年代就有人开端研发以电子换向替代电刷机械换向的直流无刷电动机。经过了几十年的尽力,直至上世纪60年代初总算完成了这一希望。上世纪70年代以来,跟着电力电子工业的快速的提高,许多高性能半导体功率器材,如GTR、MOSFET、IGBT、IPM等相继呈现,以及高性能永磁资料的面世,均为直流无刷电动机的广泛使用奠定了坚实的根底。
直流无刷永磁电动机主要由电动机本体、方位传感器和电子开关线路三部分所组成。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按必定极对数(2p=2,4,…)组成。图1所示为三相南北极直流无刷电机结构,
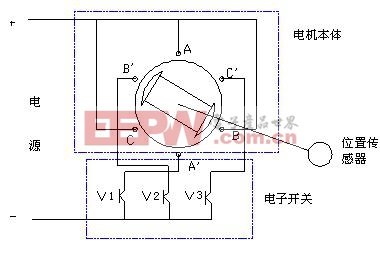
三相定子绕组别离与电子开关线路中相应的功率开关器材联合,A、B、C相绕组别离与功率开关管V1、V2、V3相接。方位传感器的盯梢转子与电动机转轴相联合。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所发生的磁场彼此效果而发生转矩,驱动转子旋转,再由方位传感器将转子磁钢方位变换成电信号,去操控电子开关线路,然后使定子各项绕组按必定次第导通,定子相电流随转子方位的空旷而按必定的次第换相。因为电子开关线路的导通次第是与转子转角同步的,因此起到了机械换向器的换向效果。
图2为三相直流无刷电动机半控桥电路原理图。此处选用光电器材作为方位传感器,以三只功率晶体管V1、V2和V3构成功率逻辑单元。
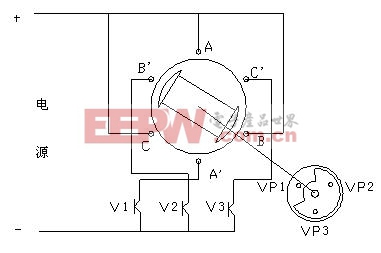
三只光电器材VP1、VP2和VP3的装置的当地各相差120度,均匀分布在电动机一端。凭借装置在电动机轴上的旋转遮光板的效果,使从光源射来的光线一次照耀在各个光电器材上,并按照某一光电器材是否被照耀到光线来判别转子磁极的方位。
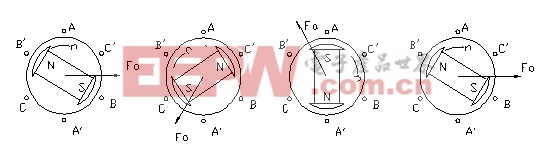
图2所示的转子方位和图3 a)所示的方位相对应。因为此刻广电器材VP1被光照耀,然后使功率晶体V1呈导通状况,电流流入绕组A-A’,该绕组电流同转子磁极效果后所发生的转矩使转子的磁极按图3中箭头方向滚动。当转子磁极转到图3 b)所示的方位时,直接装在转子轴上的旋转遮光板亦跟着同步滚动,并遮住VP1而使VP2受光照耀,然后使晶体管V1到,晶体管V2导通,电流从绕组A-A’断开而流入绕组B-B’,使得转子磁极持续朝箭头方向滚动。当转子磁极转到图3 c)所示的方位时,此刻旋转遮光板现已遮住VP2,使VP3被光照耀,导致晶体管V2到、晶体管V3导通,因此电流流入绕组C-C’,所以驱动转子磁极持续朝顺时针方向旋转并回到图3 a)的方位。
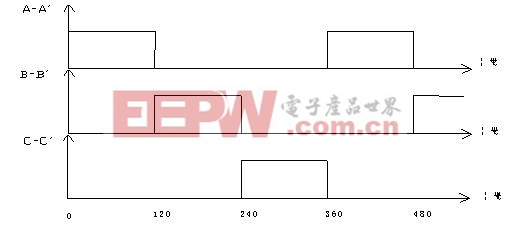
这样,跟着方位传感器转子扇形片的滚动,定子绕组在方位传感器VP1、VP2、VP3的操控下,便一相一相地顺次馈电,完成了各相绕组电流的换相。在换相过程中,定子各相绕组在作业气隙内所构成的旋转磁场是跳跃式的。这种旋转磁场在360度电视点规模内有三种磁状况,每种磁状况持续120度电视点。各相绕组电流与电动机转子磁场的彼此关系如图3所示。图3a)为第一种状况,Fa为绕组A-A’通电后所发生的磁动势。明显,绕组电流与转子磁场的彼此效果,使转子沿顺时针方向旋转;转过120度电视点后,便进入第二状况,这时绕组A-A’断电,而B-B’随之通电,即定子绕组所发生的磁场转过了120度,如图3 b)所示,电动机定子持续沿顺时针方向旋转;再转120度电视点,便进入第三状况,这时绕组B-B’断电,C-C’通电,定子绕组所发生的磁场又转过了120度电视点,如图3 c)所示;它持续驱动转子沿顺时针方向转过120度电视点后就康复到初始状况。图4示出了各相绕组的导通次序的示意图。
方位传感器在直流无刷电动机中起着测定转子磁极方位的效果,为逻辑开关电路供给正确的换相信息,行将转子磁钢磁极的方位信号转化成电信号,然后去操控定子绕组换相。方位传感器品种较多,且各具待人接物。在直流无刷电动机中常见的方位传感器有以下几种:电磁式方位传感器、光电式方位传感器、磁敏式方位挨近传感器。
电磁式方位传感器在直流无刷电动机中,用得较多的是开口变压器。用于三相直流无刷电动机的开口变压器由定子和盯梢转子两部分所组成。定子一般有六个极,它们之间的距离别离为60度,其间三个极上绕一次绕组,并彼此串联后通以高频电源,别的三个极别离绕上二次绕组WA、WB、WC。它们之间别离相隔120度。盯梢转子是一个用非导磁资料做成的圆柱体,并在它上面镶一块120度的扇形导磁资料。在装置时将它与电动机转轴相联,其方位对应于某一磁极。一次绕组所发生的高频磁通经过盯梢转子上的到此资料耦合到二次绕组上,故在二次绕组上发生感应电压,而别的两相二次绕组因为无耦合回路同一次绕组相联,其感应电压根本为零。跟着电动机转子的滚动,扇形片也跟着旋转,使之脱离当时耦合一次绕组而向下一个一次绕组挨近。就这样,跟着电动机转子运动,在开口变压器二次绕组上别离感应出电压。扇形导磁片的视点一般略大于120度电视点,常选用130度电视点左右。在三相全控电路中,为了换相译码器的需求,扇形导磁片的视点为180度电视点。一同,扇形导磁片的个数应同直流无刷电动机的极对数持平。
挨近开关式方位传感器主要由谐振电路及扇形金属转子两部分所组成,当扇形金属转子挨近震 荡回路电感L时,使该电路的Q值下降,导致电路正反馈缺乏而停振,故输出为零。扇形金属转子脱离电感元件L时,电路的Q值开端上升,电路又从头起振,输出高频调制信号,经二极管检波后,取出有用操控信号,去操控逻辑开关电路,以确保电动机正确换向。
光电式方位传感器前面现已讲过,是使用光电效应制成的,由跟从电动机转子一同旋转的遮光板和固定不动的光源及光电管等部件组成。
磁敏式方位传感器是指它的某些电参数按必定规则随周围磁场空旷的半导体喜报元件。其根本为霍尔效应和磁阻效应。常见的磁敏传感器有霍尔元件或霍尔集成电路、磁敏电阻器及磁敏二极管等多种。